2020年,受北京市科学技术委员会委托,北京行易道科技有限公司(以下简称行易道)承担《支持高级别自动驾驶的成像毫米波雷达研制》课题,近日完成了产品原型设计和测试,结果表明实现了设计指标,取得了显著成果。
图1 行易道4D雷达产品原型机
该产品实现了方位角、俯仰角、距离、速度的联合高精度测量;实现了基于目标多维特征提取算法、目标多散射点融合聚类算法、开发典型目标的运动模型,以实现目标分类、降低雷达检测虚警率,实现威胁障碍目标的高置信度检测识别。
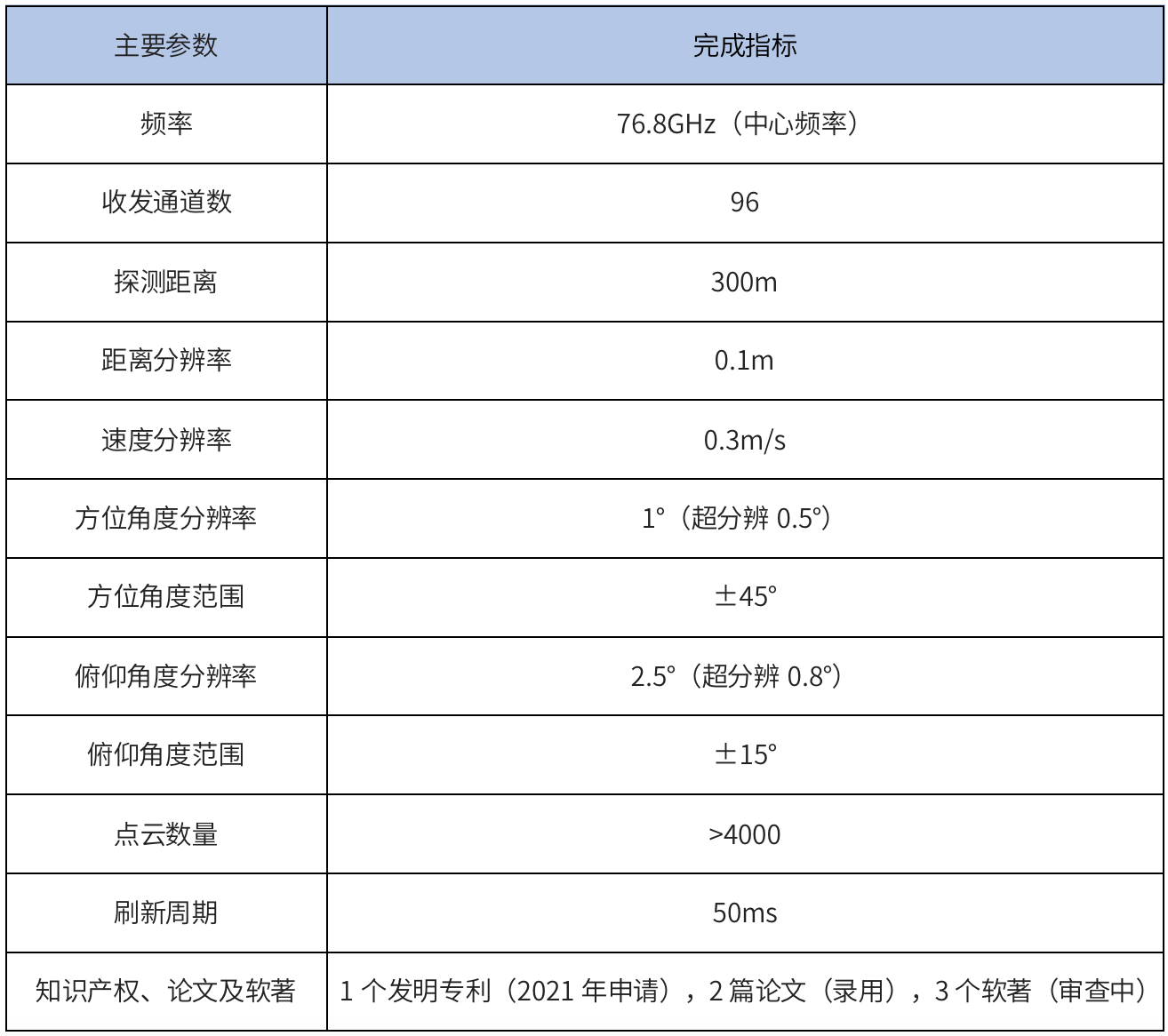
表1 行易道4D雷达产品原型机指标
行易道在车载雷达上的多年积累,在4D雷达技术上获得集中体现,在本产品中,创新的技术如下:
1、稀疏阵列天线设计。实现方位向分辨率1°,俯仰向分辨率2.5°。
2、压缩感知(Compressive Sensing)超分辨算法首次在车载雷达上工程应用,能够实现方位向0.5°,俯仰向0.8°的分辨率。
3、目标分类更加完整,能够对高程目标(灯杆、路牌、桥梁)准确分类,对于汽车、摩托车、行人分类更加准确,能够极大地保障AEB功能的可靠性。
在这些创新点中,压缩感知算法格外令人瞩目。
近年来压缩感知在生物医学成像、图像压缩、雷达目标检测等领域得到了广泛的应用。在观测对象稀疏的情况下,压缩感知可突破传统采样定理限制,利用稀疏信号处理进行无模糊重构。中科院团队将稀疏信号处理应用于雷达成像,在理论体制、方法、实验等方面取得原创性成果。
汽车雷达信号处理技术近年来蓬勃发展,但是阵列构型限制了角分辨率关键指标的进一步提升,压缩感知可突破这一瓶颈。2017年开始,德国、美国、意大利等团队将压缩感知应用于汽车雷达信号处理,实现超分辨角度估计。2019年开始,行易道和中科院团队合作,在77Ghz 车载4D雷达、77GHz车载合成孔径雷达产品研制中,引入稀疏信号处理技术,2022年实现了工程应用,取得了令人信服、令行业振奋的成果,处于行业领先地位。该成果对汽车智能化进程中实现传感器升级、满足高级别智能驾驶需求,都具有非常重要的意义和价值。
对于车载传感器来说,在汽车智能化时代,面临多维度的工程挑战:高精度目标分类能力、实时性、尺寸、鲁棒性、全天候工作和成本。毫米波雷达从1974年开始在汽车上应用,经历了收发通路从电子真空管到全固态的演进,到21世纪,在实时性、尺寸、鲁棒性、全天候工作和成本方面,表现优良,但是在高精度目标分类方面,受到尺寸、成本、技术的约束,工程化进展缓慢。
如何研制出能够满足高精度目标分类和实时工作能力,同时具有尺寸和成本优势,是摆在产业面前的难题。压缩感知超分辨算法的优势,在车载4D雷达的研制中得到充分验证,比1970年代开始被广泛应用的谱估计超分辨算法,具有运算资源占用少、运算时间短的优势,能够突破硬件尺寸、运算资源的约束,实现实时成像、高精度目标分类,尺寸、成本可控。
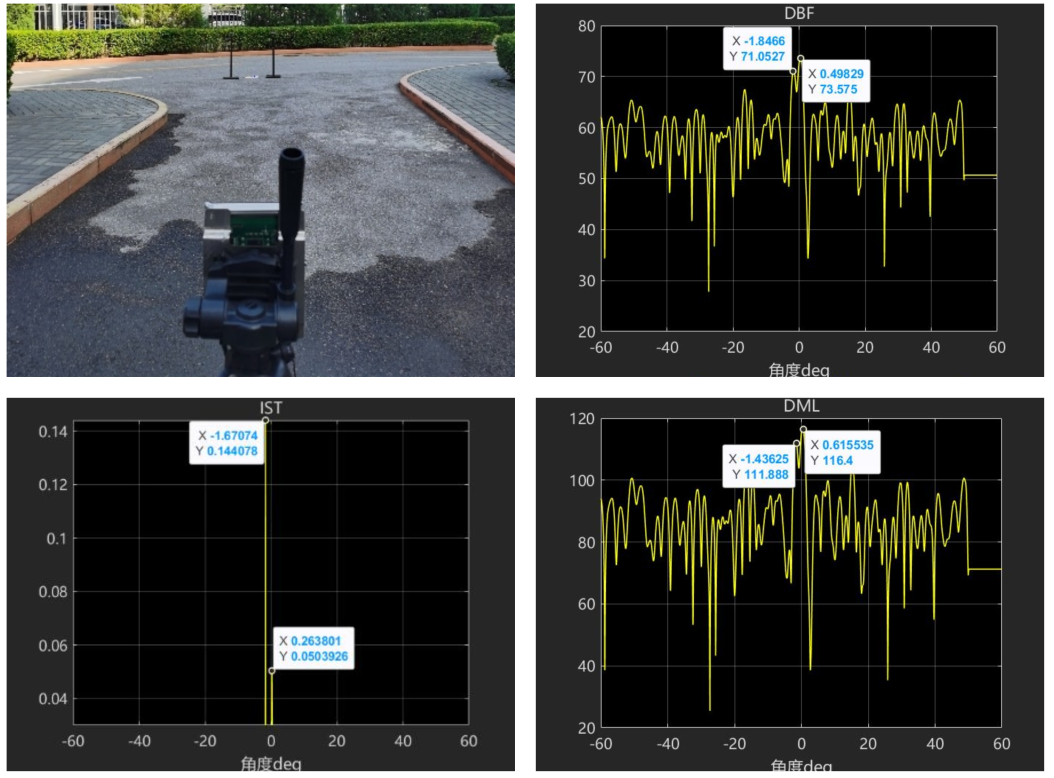
图2 行易道DBF、DML、压缩感知算法仿真对比图
为了应对日益紧迫的AEB(紧急自动刹车)全球标配浪潮,行易道沿用自主的4D雷达技术,推出满足市场需求的4D雷达产品AMRR300,这款产品将于2023年4月SOP(商业化量产),支持实现AEB功能。AMRR300延用了稀疏阵列天线设计、压缩感知算法,具有高精度目标分类能力,能够满足AEB、高级自动驾驶的应用需求。产品核心指标见表2。
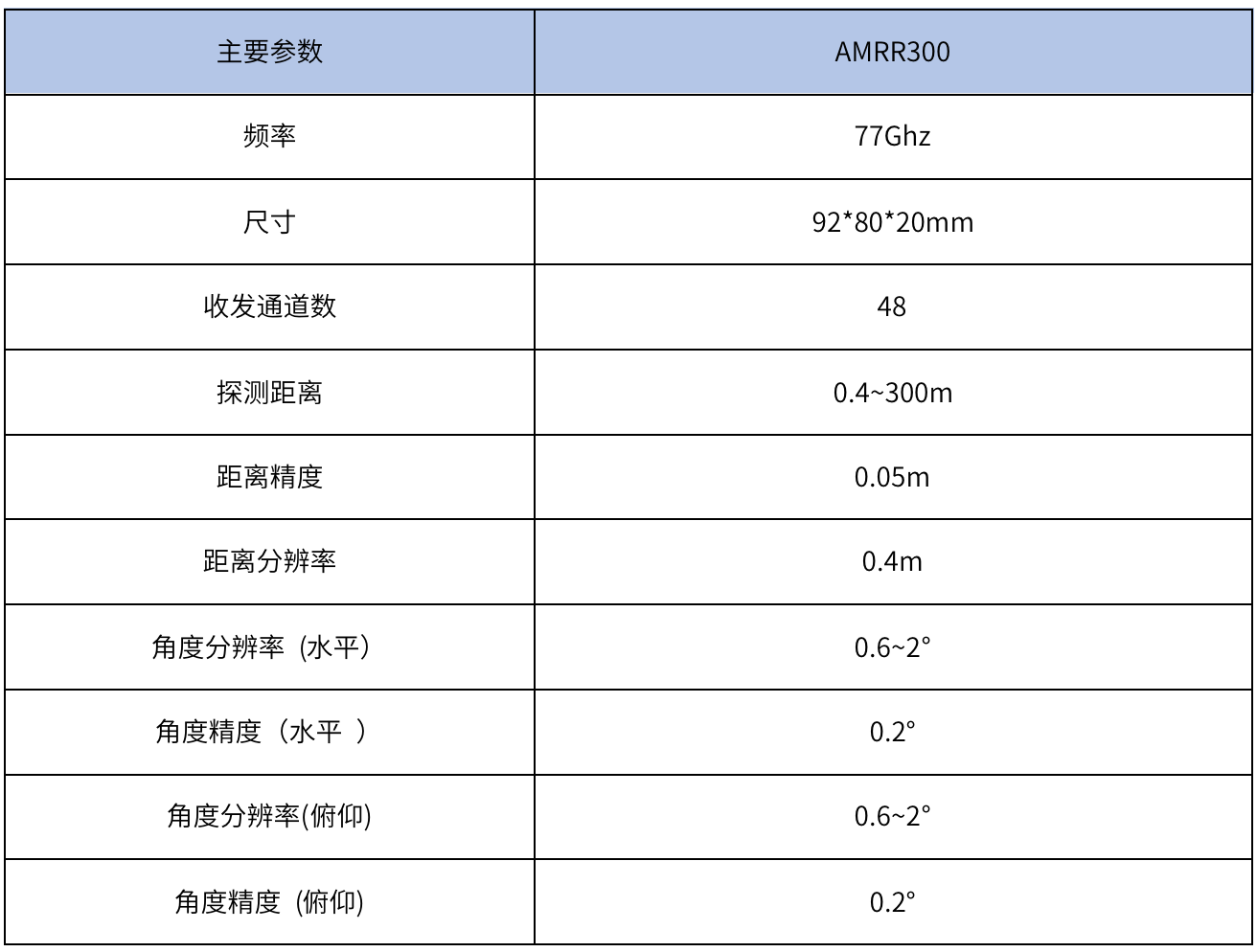
表2 行易道4D雷达产品AMRR300指标
该科委研发项目未来的技术成果转化,将给智能汽车行业带来强有力的技术推动和带动作用,从而促进科研成果经济效益的实现。